И«ҮшГвЩM(fЁЁi)ЧЙФғлҠФ’Јә400-811-7869

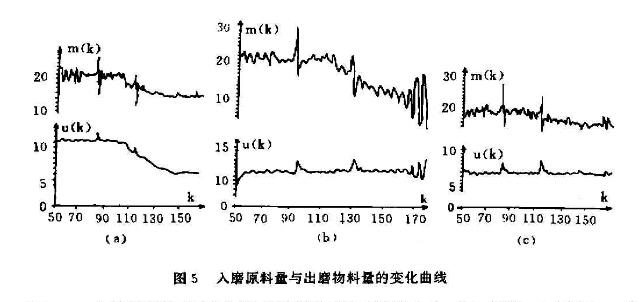
ИзҲD5ЛщКҫИлДҘФӯБПБҝЕcіцДҘОпБПБҝөДЧғ»ҜЗъҫҖЈ¬ХэКЗЗтДҘҷC(jЁ©)ЦөЧФЯm‘Ә(yЁ©ng)ҝШЦЖЛг·Ё‘Ә(yЁ©ng)УГ·ВХжҪY(jiЁҰ)№ыЈ¬ЖдЦРЈЁaЈ©ҲDһйІЙУГ®a(chЁЈn)БҝЦөЧФЯm‘Ә(yЁ©ng)ҝШЦЖ·Ҫ°ё•r(shЁӘ)өДЭ”ИлЎўЭ”іцЗъҫҖЈ»ЈЁbЈ©әНЈЁcЈ©·Ц„eһйІЙУГPIDҝШЦЖ¶шФO(shЁЁ)¶ЁЦө·ЦІјһй11.2ј°7•r(shЁӘ)өДЭ”ИлЎўЭ”іцЧғ»ҜЗъҫҖЎЈ
НЁЯ^ТФЙП·ВХжЗъҫҖҝЙТФҝҙіцЈ¬ІЙУГ®a(chЁЈn)БҝЦөЧФЯm‘Ә(yЁ©ng)ҝШЦЖЖчөДР§№ыКЗ·ЗіЈГчп@өДЎЈҫЯуwуw¬F(xiЁӨn)ФЪЈә
1ЎўУЙЈЁaЈ©ҝЙТФҝҙіцЈ¬ТтДЈРН…ў”ө(shЁҙ)өДЧғ»ҜЈ¬Э^јСіцДҘОпБПБҝM0УЙ11.2Чғ?yЁӯu)?.2Ј¬ҙЛ•r(shЁӘ)ЦөЧФРЈХэҝШЦЖЖчҝЙТФј°•r(shЁӘ)ёДЧғФӯБПЭ”ИлБҝЈ¬ұЈЧCТФЭ^РЎ·ҪІоёъЫҷM0Чғ»ҜЈ¬ІўФЪРВөД№ӨөVПВЯ_(dЁў)өҪРВөДЖҪәвЈ»
ҸДЈЁbЈ©ҝЙТФҝҙіцЈ¬ІЙУГіЈТҺ(guЁ©)PIDХ{(diЁӨo)№қ(jiЁҰ)ЖчЈ¬ФЪДЈРН…ў”ө(shЁҙ)І»Чғ»тЧғ»ҜәЬРЎ•r(shЁӘ)Ј¬лmТІДЬҝШЦЖЈ¬ө«®”(dЁЎng)…ў”ө(shЁҙ)Чғ»ҜЭ^ҙу•r(shЁӘ)Ј¬ЗтДҘҷC(jЁ©)ПөҪy(tЁҜng)ҢўЧғөГІ»·Җ(wЁ§n)¶ЁЈ»
ЈЁcЈ©ҲD„tһйНЁіЈІЙУГPIDҝШЦЖІЯВФ•r(shЁӘ)өДЧц·ЁЈ¬Льҝј‘]өҪЗтДҘҷC(jЁ©)ПөҪy(tЁҜng)өД•r(shЁӘ)ЧғЈ¬һй·АЦ№ПөҪy(tЁҜng)ЯM(jЁ¬n)ИлІ»·Җ(wЁ§n)¶Ё№ӨөVЈ¬¶шҢўФO(shЁЁ)¶ЁЦөФO(shЁЁ)¶ЁөГәЬРЎЈ¬ТФЦБУЪ®a(chЁЈn)БҝТ»ЦұәЬөНЈ¬Ф“·Ҫ·ЁлmДЬЯ_(dЁў)өҪ·Җ(wЁ§n)¶ЁЙъ®a(chЁЈn)Ј¬ө«ҢҚ(shЁӘ)лH®a(chЁЈn)БҝЭ^РЎЈ¬Р§ВКЭ^өНЎЈ
2ЎўҢҰ(duЁ¬)ФӯБПБҝІЁ„У(dЁ°ng)ЛщТэЖрөДёЙ”_Ј¬ҹoХ“КЗДЈРН…ў”ө(shЁҙ)І»Чғ»тҫҸЧғ•r(shЁӘ)Ј¬ЦөЧФРЈХэҝШЦЖ¶јДЬј°•r(shЁӘ)өШЯM(jЁ¬n)РРХ{(diЁӨo)№қ(jiЁҰ)Ј¬ұЈЧCmЈЁtЈ©ұЈіЦФЪM0ёҪҪьЈ¬¶шPIDҝШЦЖЖчҝЛ·юЭ”ИлБҝёЙ”_өДДЬБҰ„tұИЭ^ІоЎЈ
п@И»Ј¬ЦөЧФРЈХэҝШЦЖЖчЗуИЎЗтДҘҷC(jЁ©)ПөҪy(tЁҜng)Э^ҙуЙъ®a(chЁЈn)ДЬБҰІўёъЫҷЙъ®a(chЁЈn)ДЬБҰЧғ»ҜөДЧчУГКЗіЈТҺ(guЁ©)PIDХ{(diЁӨo)№қ(jiЁҰ)Жчҹo·ЁҢҚ(shЁӘ)¬F(xiЁӨn)өДЈ¬¶шФЪҝЛ·юёЙ”_ТтЛШөДУ°н‘·ҪГжЈ¬ЦөЧФРЈХэҝШЦЖЖчөДХ{(diЁӨo)№қ(jiЁҰ)ДЬБҰТІғһ(yЁӯu)УЪPIDХ{(diЁӨo)№қ(jiЁҰ)ЖчЎЈ
ОДХВФҙЧФЈәhttp://ncsyl.com/